登录
登录汽车工程课程推荐
汽车工程热门资料
汽车检测设备有哪些?全面盘点机动车检测设备类型

中车友讲解主流汽车检测设备的分类、功能与应用场景,包括安全、动力、底盘、排放、电控等机动车检测设备,助力从业人员掌握专业检测技能,了解机动车检测全套配置。
不同驱动形式汽车优缺点解析与选择建议(2025年最新版)
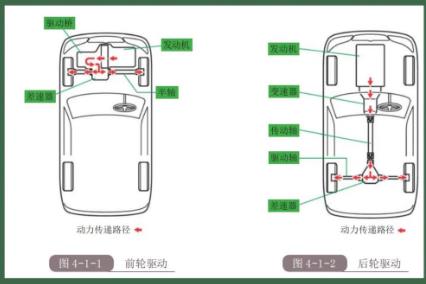
目前,市场上主流的汽车多数采用发动机前置的设计,因此我们常说的前驱、后驱和四驱,实际上指的是前置前驱、前置后驱和前置四驱。那么,这些不同的驱动方式各自有哪些优缺点呢?
刹车系统保养需要注意哪些细节?

刹车关乎行车安全,很多车主只知道更换刹车片,忽略很多养护细节。从刹车片、刹车盘、刹车油、刹车分泵、轮胎轴承等部位讲解保养检查要点,告诉你什么时候该换配件、日常如何正确刹车延长制动部件寿命。
汽车折旧率高低怎么影响用车成本?二手车检测师拆解隐性养车开销

折旧快慢决定车辆转手亏损与维修费用,资深二手车检测师结合汽车维修技师实战经验,讲解高折旧车型额外养车成本,教你降低车辆折价损失。
车辆换个车牌流程是怎样?

如果是在本市内进行车牌更换,一般有两种常见情况。一种是因车辆过户而换牌,另一种是保留原车牌更换新车。
汽车性能基础知识与客户接待流程|汽车门店服务规范
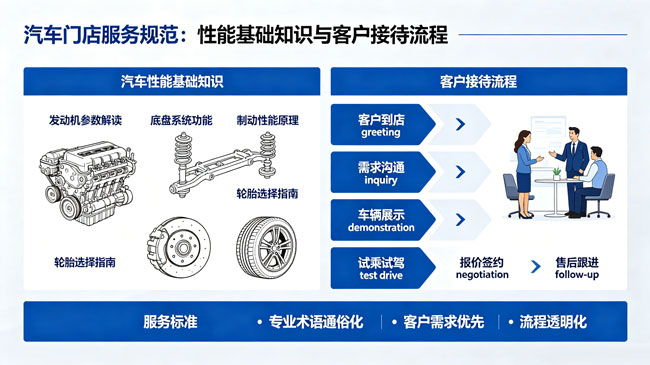
中车友讲解汽车核心性能基础知识、各项性能作用,以及标准化汽车客户接待流程、服务礼仪与沟通技巧,适合汽车销售、汽车美容师、汽修服务人员学习参考,提升门店服务专业度与客户满意度。