登录
登录
围绕智能网联汽车技术产业链,培养适应智能网联汽车产业发展需求,具有车联网技术应用、单片机及嵌入式系统开发能力,良好的职业道德、工匠精神和创新创业能力,能从事汽车智能控制产品和智能网联汽车生产、装调、检测、维修、销售等岗位工作的复合型技术、技能人才。
汽车网联课程推荐
汽车网联热门资料
博鳌亚洲论坛上的车联网黑科技:“绿色”+“智慧”

近日,随着博鳌东屿岛车联网项目建成并投入试运营,博鳌亚洲论坛年会践行“智慧办会”“绿色办会”理念再添利器。
据悉,博鳌东屿岛车联网项目作为省级车联网先导性项目,在2022年博鳌亚洲论坛年会期间亮相展示,旨在向世界传递海南省发展车联网产业的决心和信心,借此扩大我国车联网和5G的影响力,助力“智慧海南”建设。
智能座舱芯片独占鳌头,高通 8155 芯片占领众多新车

汽车不仅仅是进入到一个新能源的时代,也同步加速跨入了智能的时代。新的消费群体对于数码和数字体验更加看重,而在系统的背后,则是芯片的竞争。这一次,高通同样站在了智能座舱芯片的背后,扮演了重要的角色。高通现在在车载智能方面的影响力不小,这一点从即将推出的几款新车就可以看出来,都搭载了高通 8155 芯片。
智能汽车七十二变,是车企异想天开还是极度内卷?

随着黑科技入侵汽车领域,未来汽车还只是四个轮子的代步工具吗?当前,为了在智能化方面展开差异化竞争,有的车企在造卫星,有的车企在造汽车机器人,有的车企在造飞行汽车……
电动车的竞争焦点已从过去的电动化阶段逐渐变成智能化,许多企业在研发自动驾驶技术的同时,大胆尝试各种新技术赋能。一旦解放人类双手,汽车将具有更大的想象空间。在中国电动汽车百人会理事长陈清泰看来,智能汽车正在颠覆功能汽车。它比智能手机颠覆功能手机的影响范围更大,对经济社会的改变更加深刻。这次汽车革命不是孤立进行的,与它并行和衔接的是新能源革命和新一代移动通信,是交通革命和智慧城市;支撑这场汽车革命的是移动互联网、数字经济和人工智能技术的快速发展,这些因素与汽车变革交融和互动,为未来汽车的电动化、绿色化、网联化、智能化和共享化提供了技术基础和丰富的使用场景。
汽车网联技术是什么?
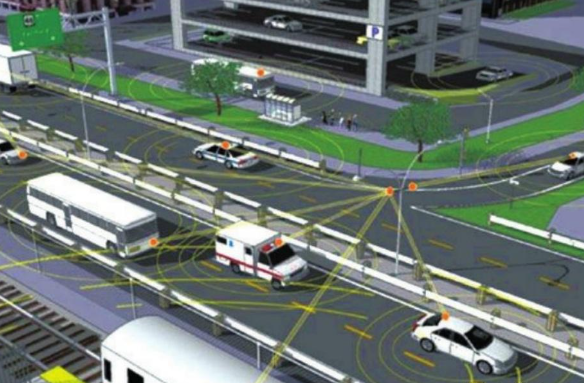
汽车网联技术指什么?中车友详解其定义、V2X通信架构、核心技术及应用场景,包括智能驾驶、车载服务等,为大家提供认知普及需求。
智能网联汽车的“开路先锋”者

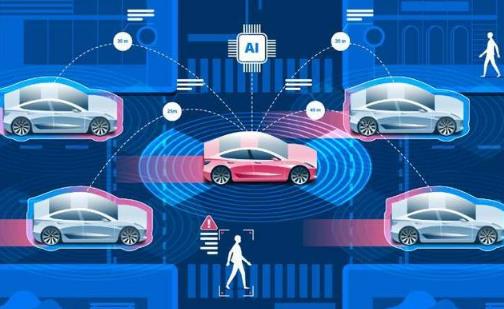
车联网如何实现车辆与万物互联
在2025年,汽车智能网联技术正以前所未有的速度发展,车联网作为其核心组成部分,致力于实现车辆与万物的互联互通,为人们的出行和汽车行业带来全新的变革。车联网就像一张无形的大网,将车辆与周边环境紧密相连,创造出更加便捷、高效、安全的出行体验。